



 所有產(chǎn)品分類
所有產(chǎn)品分類
您的當(dāng)前位置:網(wǎng)站首頁 > 產(chǎn)品中心 > 日本工業(yè)產(chǎn)品
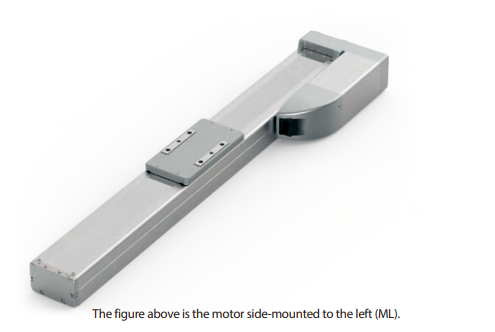
日本IAI滑臺(tái)RCP6-SA8R-WA-56SP-30-450-P4-N-CJ0-ML
The figure above is the motor side-mounted to the left (ML).Legend: ? Stroke ? Applicable controller/I/O type ? Cable length ? OptionsStroke (mm) RCP6 RCP6S Stroke (mm) RCP6 RCP6S50 ? ? 600 ? ?100 ? ? 650 ? ?150 ? ? 700 ? ?200 ? ? 750 ? ?250 ? ? 800 ? ?300 ? ? 850 ? ?350 ? ? 900 ? ?400 ? ? 950 ? ?450 ? ? 1000 ? ?500 ? ? 1050 ? ?550 ? ? 1100 ? ?Cable Type Cable Code RCP6 RCP6SStandardP (1m) ? ?S (3m) ? ?M (5m) ? ?Specified LengthX06 (6m) ~X10 (10m) ? ?X11 (11m) ~X15 (15m) ? ?X16 (16m) ~X20 (20m) ? ?Robot CableR01 (1m) ~R03 (3m) ? ?R04 (4m) ~R05 (5m) ? ?R06 (6m) ~R10 (10m) ? ?R11 (11m) ~R15 (15m) ? ?R16 (16m) ~R20 (20m) ? ?* Please refer to P.144 for more information regarding the maintenance cables.P O I N TSelectionNotes(1) The maximum acceleration/deceleration is 1G for horizontal, and 0.5G forvertical use.(2) The actuator specification displays the payload's maximum value, but it will varydepending on the acceleration and speed. Please refer to the "SelectionGuidelines" (RCP6 Tables of Payload by Speed/Acceleration) on P.115 for moredetails.(3) When performing push-motion operation, please confirm the push force of eachmodel by checking the "Correlation diagram of push force and current limit" on P.113

 友情鏈接Link
友情鏈接Link





